Varios
119
TRADUCCIONES
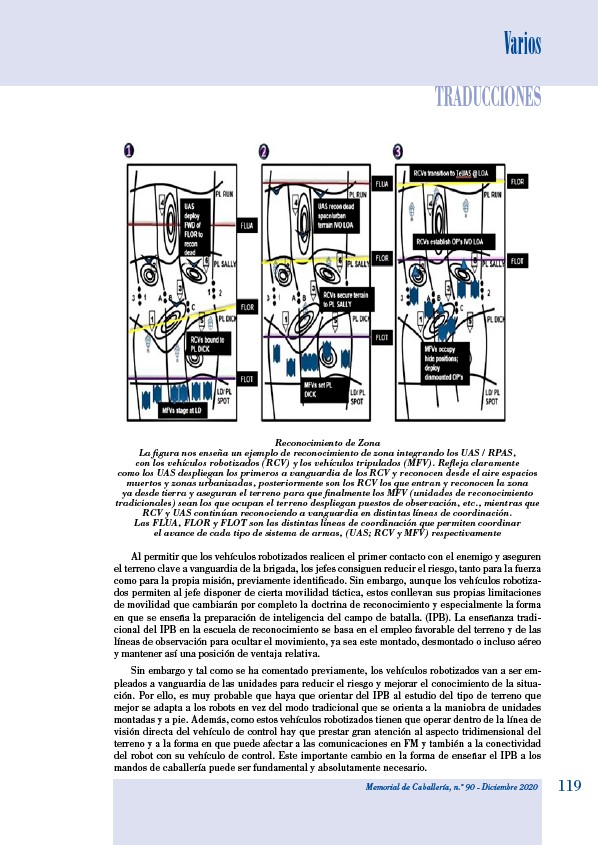
Reconocimiento de Zona
La figura nos enseña un ejemplo de reconocimiento de zona integrando los UAS / RPAS,
con los vehículos robotizados (RCV) y los vehículos tripulados (MFV). Refleja claramente
como los UAS despliegan los primeros a vanguardia de los RCV y reconocen desde el aire espacios
muertos y zonas urbanizadas, posteriormente son los RCV los que entran y reconocen la zona
ya desde tierra y aseguran el terreno para que finalmente los MFV (unidades de reconocimiento
tradicionales) sean los que ocupan el terreno despliegan puestos de observación, etc., mientras que
RCV y UAS continúan reconociendo a vanguardia en distintas líneas de coordinación.
Las FLUA, FLOR y FLOT son las distintas líneas de coordinación que permiten coordinar
el avance de cada tipo de sistema de armas, (UAS; RCV y MFV) respectivamente
Al permitir que los vehículos robotizados realicen el primer contacto con el enemigo y aseguren
el terreno clave a vanguardia de la brigada, los jefes consiguen reducir el riesgo, tanto para la fuerza
como para la propia misión, previamente identificado. Sin embargo, aunque los vehículos robotizados
permiten al jefe disponer de cierta movilidad táctica, estos conllevan sus propias limitaciones
de movilidad que cambiarán por completo la doctrina de reconocimiento y especialmente la forma
en que se enseña la preparación de inteligencia del campo de batalla. (IPB). La enseñanza tradicional
del IPB en la escuela de reconocimiento se basa en el empleo favorable del terreno y de las
líneas de observación para ocultar el movimiento, ya sea este montado, desmontado o incluso aéreo
y mantener así una posición de ventaja relativa.
Sin embargo y tal como se ha comentado previamente, los vehículos robotizados van a ser empleados
a vanguardia de las unidades para reducir el riesgo y mejorar el conocimiento de la situación.
Por ello, es muy probable que haya que orientar del IPB al estudio del tipo de terreno que
mejor se adapta a los robots en vez del modo tradicional que se orienta a la maniobra de unidades
montadas y a pie. Además, como estos vehículos robotizados tienen que operar dentro de la línea de
visión directa del vehículo de control hay que prestar gran atención al aspecto tridimensional del
terreno y a la forma en que puede afectar a las comunicaciones en FM y también a la conectividad
del robot con su vehículo de control. Este importante cambio en la forma de enseñar el IPB a los
mandos de caballería puede ser fundamental y absolutamente necesario.
Memorial de Caballería, n.º 90 - Diciembre 2020